RT-Thread 线程管理(二)
线程的管理方式
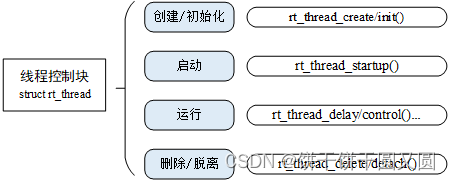
下图描述了线程的相关操作,包含:创建 / 初始化线程、启动线程、运行线程、删除 / 脱离线程。可以使用 rt_thread_create() 创建一个动态线程,使用 rt_thread_init() 初始化一个静态线程。
动态线程与静态线程的区别是:动态线程是系统自动从动态内存堆上分配栈空间与线程句柄(初始化heap之后才能使用create创建动态线程),静态线程是由用户分配栈空间与线程句柄。
创建和删除线程
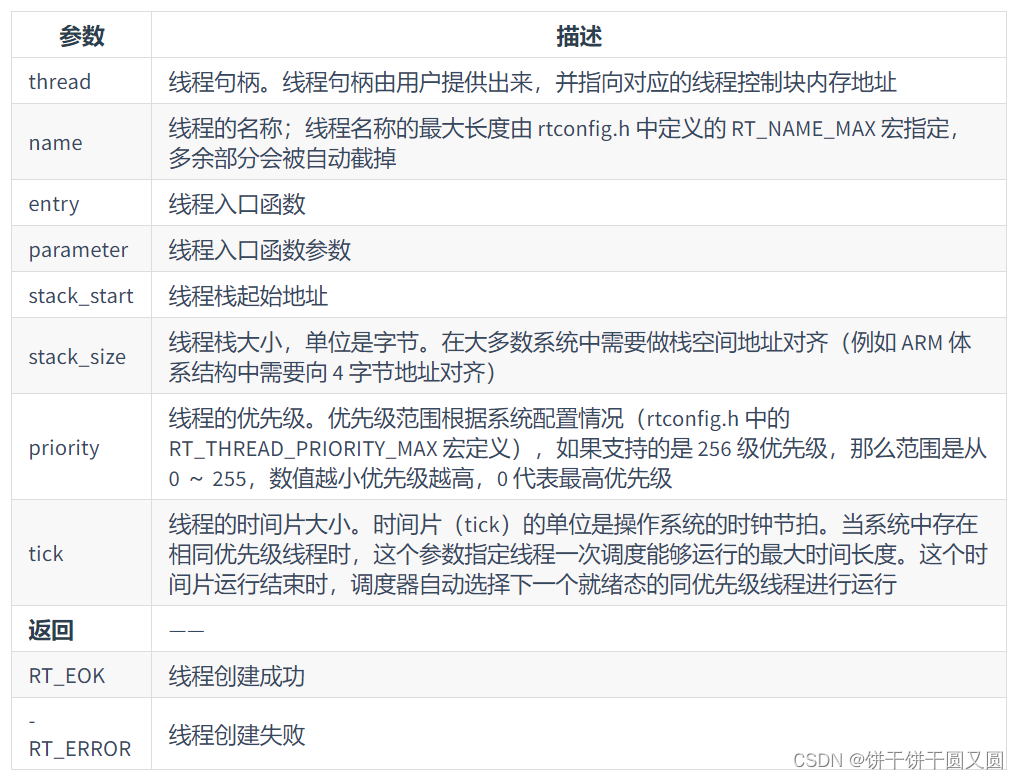
一个线程要成为可执行的对象,就必须由操作系统的内核来创建一个线程。可以通过如下的接口创建一个动态线程:
rt_thread_t rt_thread_create(const char* name, void (*entry)(void *parameter), void *parameter, rt_uint32_t stack_size, rt_uint8_t priority, rt_uint32_t tick);
调用这个函数时,系统会从动态内存堆中分配一个线程句柄以及按照参数中指定的栈大小从动态堆内存中分配相应的空间。
分配出来的栈空间是按照rtconfig.h中配置的RT_ALIGN_SIZE方式对齐。
对于一些使用 rt_thread_create() 创建出来的线程,当不需要使用,或者运行出错时,我们可以使用下面的函数接口来从系统中把线程完全删掉:
rt_err_t rt_thread_delete(rt_thread_t thread);
调用该函数后,线程对象将会被移出线程队列并从内核对象管理器中删除,线程占用的堆栈空间也会被释放,收回的空间将重新用于其它的内存分配。实际上,用rt_thread_delete()函数删除线程接口,仅仅是把相应的线程状态更改为CLOSE状态,然后放入到rt_thread_defunct队列中;而真正的删除动作(释放线程控制块和释放线程栈)需要到下一次执行空闲线程时,由空闲线程完成最后的线程删除动作。
初始化和脱离线程
rt_err_t rt_thread_init(struct rt_thread* thread,
const char* name,
void (*entry)(void* parameter), void* parameter,
void* stack_start, rt_uint32_t stack_size,
rt_uint8_t priority, rt_uint32_t tick);
静态线程的线程句柄(或者说线程控制块指针)、线程栈由用户提供。
静态线程是指线程控制块、线程运行栈一般都设置为全局变量,在编译时就确定、被分配处理,内核不负责动态分配内存空间。需要注意的是,用户提供的栈首地址需要做系统对齐(例如ARM上需要做4字节对齐)。
对于用rt_thread_init()初始化的线程,使用rt_thread_detach()将使线程对象在线程队列和内核对象管理器中被脱离。
rt_err_t rt_thread_detach(rt_thread_t thread);
启动线程
创建的线程状态处于初始状态,并未进入就绪线程的调度队列,我们可以在线程初始化 / 创建成功后调用下面的函数接口让该线程进入就绪态:
rt_err_t rt_thread_startup(rt_thread_t thread);
当调用这个函数时,将把线程的状态更改为就绪状态,并放到相应优先级队列中等待调度。如果新启动的线程优先级比当前线程优先级高,将立刻切换到这个线程。
获得当前线程
在程序的运行过程中,相同的一段代码可能会被多个线程执行,在执行的时候可以通过下面的函数接口获得当前执行的线程句柄:
rt_thread_t rt_thread_self(void);
使线程让出处理器资源
当前线程的时间片用完或者该线程主动要求让出处理器资源,它将不再占有处理器,调度器会选择相同优先级的下一个线程执行。线程调用这个接口后,这个线程仍然在就绪队列中。
rt_err_t rt_thread_yield(void);
调用该函数后,当前线程首先把自己从它所在的就绪优先级线程队列中删除,然后把自己挂到这个优先级队列链表的尾部,然后激活调度器进行上下文切换(如果当前优先级只有这一个线程,那么这个线程继续执行,不进行上下文切换)。
rt_thread_yield()函数和rt_schedule()函数比较相像,但在有相同优先级的其它就绪态线程存在时,系统行为不一样。
执行 rt_thread_yield() 函数后,当前线程被换出,相同优先级的下一个就绪线程将被执行。而执行 rt_schedule() 函数后,当前线程不一定被换出,即使被换出,也不会被放到就绪线程链表的尾部,而是在系统中选取就绪的优先级最高的线程执行(如果系统中没有比当前线程优先级更高的线程存在,那么执行完 rt_schedule() 函数后,系统将继续执行当前线程)。
使线程睡眠
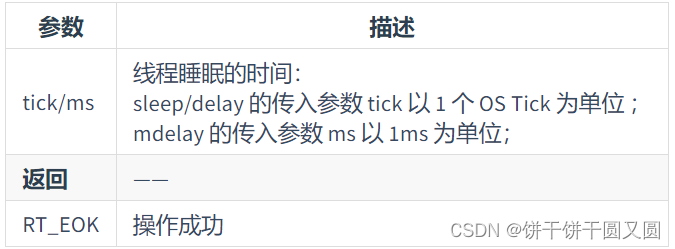
在实际应用中,我们有时需要让运行的当前线程延迟一段时间,在指定的时间到达后重新运行,这就叫做 “线程睡眠”。线程睡眠可使用以下三个函数接口:
rt_err_t rt_thread_sleep(rt_tick_t tick);
rt_err_t rt_thread_delay(rt_tick_t tick);
rt_err_t rt_thread_mdelay(rt_int32_t ms);
这三个函数接口的作用相同,调用它们可以使当前线程挂起一段指定的时间,当这个时间过后,线程会被唤醒并再次进入就绪状态。这个函数接受一个参数,该参数指定了线程的休眠时间。
挂起和恢复线程
当线程调用rt_thread_delay()时,线程将主动挂起;当调用rt_sem_take(),rt_mb_recv()等函数时,资源不可使用也将导致线程挂起。处于挂起状态的线程,如果其等待的资源超时(超过其设定的等待时间),那么该线程将不再等待这些资源,并返回到就绪状态;或者,当其它线程释放掉该线程所等待的资源时,线程也会返回到就绪状态。
rt_err_t rt_thread_suspend(rt_thread_t thread);
一个线程尝试挂起另一个线程是一个非常危险的行为,因此RT-Thread对此函数有严格的使用限制:该函数只能使用来挂起当前线程(即自己挂起自己),不可以在线程A中尝试挂起线程B。
而且在挂起线程自己后,需要立刻调用rt_schedule()函数进行手动的线程上下文切换。
这是因为A线程在常识挂起BB线程时,A线程并不清楚B线程正在运行什么程序,一旦B线程正在使用互斥量、信号量等影响、阻塞其它线程的内核对象,如果此时其它线程也在等待这个内核对象,那么A线程尝试挂起B线程的操作将会引发其它线程的饥饿,严重危及系统的实时性。
恢复线程就是让挂起的线程重新进入就绪状态,并将线程放入系统的就绪队列中;如果被恢复线程在所有就绪态线程中,位于最高优先级链表的第一位,那么系统将进行线程上下文的切换。
线程恢复使用下面的函数接口:
rt_err_t rt_thread_resume(rt_thread_t thread);
控制线程
当需要对线程进行一些其他控制时,例如动态更改线程的优先级,可以调用如下函数接口:
rt_err_t rt_thread_control(rt_thread_t thread, rt_uint8_t cmd, void *arg);
指示控制命令 cmd 当前支持的命令包括:
RT_THREAD_CTRL_CHANGE_PRIORITY:动态更改线程的优先级;
RT_THREAD_CTRL_STARTUP:开始运行一个线程,等同于 rt_thread_startup() 函数调用;
RT_THREAD_CTRL_CLOSE:关闭一个线程,等同于 rt_thread_delete() 或 rt_thread_detach() 函数调用。
设置和删除空闲钩子
空闲钩子函数是空闲线程的钩子函数,如果设置了空闲钩子函数,就可以在系统执行空闲线程时,自动执行空闲钩子函数来做一些其它事情。比如系统指示灯。
设置/删除空闲钩子的接口如下:
rt_err_t rt_thread_idle_sethook(void (*hook)(void));
rt_err_t rt_thread_idle_delhook(void (*hook)(void));
空闲线程是一个线程状态永远为就绪态的线程,因此设置的钩子函数必须保证空闲线程在任何时刻都不会处于挂起状态,例如rt_thread_delay(),rt_sem_take()等可能会导致线程挂起的函数都不能使用。并且,由于malloc、free等内存相关的函数内部使用了信号量作为临界区保护,因此在钩子函数内部也不允许调用此类函数。
设置调度器钩子
在整个系统的运行时,系统都处于线程运行、中断触发-响应中断、切换到其它线程,甚至是线程间的切换过程中,或者说系统的上下文切换是系统中最普遍的事件。
有时用户可能会想知道在一个时刻发生了什么样的线程切换,可以通过调用下面的函数接口设置一个相应的钩子函数。
在系统线程切换时,这个钩子函数将被调用:
void rt_scheduler_sethook(void (*hook)(struct rt_thread* from, struct rt_thread* to));
创建线程示例
这个例子创建一个动态线程初始化一个静态线程,一个线程在运行完毕后自动被系统删除,另一个线程一直打印计数。
#include <rtthread.h>
#define THREAD_PRIORITY 25
#define THREAD_STACK_SIZE 512
#define THREAD_TIMESLICE 5
static rt_thread_t tid1 = RT_NULL;
/* 线程 1 的入口函数 */
static void thread1_entry(void *parameter)
{
rt_uint32_t count = 0;
while (1)
{
/* 线程 1 采用低优先级运行,一直打印计数值 */
rt_kprintf("thread1 count: %d\n", count ++);
rt_thread_mdelay(500);
}
}
ALIGN(RT_ALIGN_SIZE)
static char thread2_stack[1024];
static struct rt_thread thread2;
/* 线程 2 入口 */
static void thread2_entry(void *param)
{
rt_uint32_t count = 0;
/* 线程 2 拥有较高的优先级,以抢占线程 1 而获得执行 */
for (count = 0; count < 10 ; count++)
{
/* 线程 2 打印计数值 */
rt_kprintf("thread2 count: %d\n", count);
}
rt_kprintf("thread2 exit\n");
/* 线程 2 运行结束后也将自动被系统脱离 */
}
/* 线程示例 */
int thread_sample(void)
{
/* 创建线程 1,名称是 thread1,入口是 thread1_entry*/
tid1 = rt_thread_create("thread1",
thread1_entry, RT_NULL,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE);
/* 如果获得线程控制块,启动这个线程 */
if (tid1 != RT_NULL)
rt_thread_startup(tid1);
/* 初始化线程 2,名称是 thread2,入口是 thread2_entry */
rt_thread_init(&thread2,
"thread2",
thread2_entry,
RT_NULL,
&thread2_stack[0],
sizeof(thread2_stack),
THREAD_PRIORITY - 1, THREAD_TIMESLICE);
rt_thread_startup(&thread2);
return 0;
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(thread_sample, thread sample);
线程调度器钩子示例
在线程进行调度切换时,会执行调度,我们可以设置一个调度器钩子,这样可以在线程切换时,做一些额外的事情,这个例子是在调度器钩子函数中打印线程间的切换信息。
#include <rtthread.h>
#define THREAD_STACK_SIZE 1024
#define THREAD_PRIORITY 20
#define THREAD_TIMESLICE 10
/* 针对每个线程的计数器 */
/* 线程 1、2 共用一个入口,但入口参数不同 */
static void thread_entry(void* parameter)
{
rt_uint32_t value;
value = (rt_uint32_t)parameter;
while (1)
{
rt_kprintf("thread %d is running\n", value);
rt_thread_mdelay(1000); // 延时一段时间
}
}
static rt_thread_t tid1 = RT_NULL;
static rt_thread_t tid2 = RT_NULL;
int scheduler_hook(void)
{
/* 设置调度器钩子 */
rt_scheduler_sethook(hook_of_scheduler);
/* 创建线程 1 */
tid1 = rt_thread_create("thread1",
thread_entry, (void*)1,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE);
if (tid1 != RT_NULL)
rt_thread_startup(tid1);
/* 创建线程 2 */
tid2 = rt_thread_create("thread2",
thread_entry, (void*)2,
THREAD_STACK_SIZE,
THREAD_PRIORITY,THREAD_TIMESLICE - 5);
if (tid2 != RT_NULL)
rt_thread_startup(tid2);
return 0;
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(scheduler_hook, scheduler_hook sample);
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Spring Boot + RabbitMQ 配置参数解释
- VMware 虚拟机 ubuntu 20.04 硬盘扩容方法
- springboot/java/php/node/python基于springboot的高校在线心理咨询系统【计算机毕设】
- 学习路径概览
- python强大的排列组合库-itertools
- JavaScript中作用域的理解
- [前端已死论]——“Java 已死、前端已凉”
- KylinV10 将项目上传至 Github
- Python的旅游数据可视化大屏平台:从爬虫到景点门票的全面解析
- 安装MySQL8.0