无监督去噪的一个变迁(1)——N2N→N2V→HQ-SSL
目录
知乎同名账号同步发表
1. 前沿
N2N,即Noise2Noise: Learning Image Restoration without Clean Data,2018 ICML的文章。
N2V,即Noise2Void - Learning Denoising from Single Noisy Images,2019 CVPR的文章。
这两个工作都是无监督去噪的重要开山之作,本文先对其进行简单总结,然后引出一个变体:HQ-SSL(2019 NIPS)。
本系列会对近一两年的顶会顶刊无监督图像恢复(主要是去噪)工作、时间有点久远但是非常经典的无监督图像恢复工作进行学习总结。欢迎大家评论交流、关注、批评。
2. N2N
相信大家对这句话不算陌生:同一场景下的两次含噪声的观测(noisy observation)。

上图就是该方法的训练策略,
x
i
x_i
xi?和
y
i
y_i
yi?分别表示同一个场景下的两次相互独立的含噪声的观测。
f
θ
(
?
)
f_\theta(·)
fθ?(?)表示网络。
为什么这样训练就能让 f θ ( ? ) f_\theta(·) fθ?(?)学会去噪呢?这是因为有如下假设:
- 第一,噪声零均值假设;
- 第二, x i x_i xi?和 y i y_i yi?是同一场景下的两次观测;
- 第三,不同次的含噪声的观测之间,噪声相互独立。
为了简便起见,我们将一张noisy image表示为如下形式:
i
m
a
g
e
=
s
i
g
n
a
l
+
n
o
i
s
e
image=signal+noise
image=signal+noise
即含噪声的图片是由信号和噪声想加而成(这样不严谨,因为噪声未必是加性噪声,但是此处为了方便,我们可以这样阐述)。我们可以将
x
i
x_i
xi?和
y
i
y_i
yi?分别用上述形式表示如下:
x
i
=
s
i
+
x
n
i
,
y
i
=
s
i
+
y
n
i
x_i=s_i+xn_i,y_i=s_i+yn_i
xi?=si?+xni?,yi?=si?+yni?
我们将
x
i
x_i
xi?和
y
i
y_i
yi?两张图片都表示为信号+噪声的形式,再用前文的损失函数,即网络尝试学会将
x
i
x_i
xi?映射为
y
i
y_i
yi?。由于噪声相互独立这一假设,
x
n
i
xn_i
xni?和
y
n
i
yn_i
yni?毫无关联,但由于这是同一场景下的两次观测,所以两者中信号的部分都用
s
i
s_i
si?表示。
网络尝试学会将
x
i
x_i
xi?映射为
y
i
y_i
yi?,就是将
s
i
+
x
n
i
s_i+xn_i
si?+xni?映射为
s
i
+
y
n
i
s_i+yn_i
si?+yni?:
f
θ
(
x
i
)
=
f
θ
(
s
i
+
x
n
i
)
→
s
i
+
y
n
i
f_\theta(x_i)=f_\theta(s_i+xn_i)→s_i+yn_i
fθ?(xi?)=fθ?(si?+xni?)→si?+yni?
由于
x
n
i
xn_i
xni?和
y
n
i
yn_i
yni?毫无关联,将
x
n
i
xn_i
xni?映射为
y
n
i
yn_i
yni?是不可能的。此时用数学语言表述,网络的输出可以表示为如下形式:
f
θ
(
x
i
)
=
f
θ
(
s
i
+
x
n
i
)
→
s
i
+
随机噪声
f_\theta(x_i)=f_\theta(s_i+xn_i)→s_i+随机噪声
fθ?(xi?)=fθ?(si?+xni?)→si?+随机噪声
网络并没有办法建立xn_i和yn_i的联系,这种
随机
→
随机
随机→随机
随机→随机的映射,最终会演变为
随机
→
E
(
随机
)
随机→E(随机)
随机→E(随机)的映射。由于噪声零均值这一假设,上式可以进一步写为:
f
θ
(
x
i
)
=
f
θ
(
s
i
+
x
n
i
)
→
E
(
s
i
+
随机噪声
)
=
s
i
+
E
(
随机噪声
)
=
s
i
f_\theta(x_i)=f_\theta(s_i+xn_i)→E(s_i+随机噪声)=s_i+E(随机噪声)=s_i
fθ?(xi?)=fθ?(si?+xni?)→E(si?+随机噪声)=si?+E(随机噪声)=si?
所以,只要满足噪声零均值假设、两次观测x和y在同一场景下、两次观测的噪声相互独立,那么就可以通过让网络学习从x映射到y的方式学会去噪。作者亦通过实验证明了有效性。
3. N2V——盲点网络(BSNs,Blind Spot Networks)开创者
N2V可以视为对N2N的批判,理由如下:
N2N的训练数据是相同场景的两次不同noisy observation组成的pair,实际使用的时候,两次不同的观测很难是相同场景的。比如医学图像,两次拍摄的时间不一样,也许器官在位置上发生了细微的变化,这就不能叫做严格的相同场景。
以上的问题,核心在于训练需要两张noisy image。那么能否只用一张noisy image就完成训练呢?当然可以,其实N2N之后涌现了Neighbor2Neighbor、N2V这样优秀的工作,这些都可以不必依赖于noisy image pair,而是依赖于single noisy image就能够完成训练。Neighbor2Neighbor是对一张noisy image进行采样得到pair,然后采用N2N的方式进行训练,并通过loss消除location gap;N2V则完全采用了和N2N不一样的思路,接下来我们主要介绍一下N2V,因为它是BSNs的开创者(to my best knowledge,所以此说法如有不对请评论区指出)。
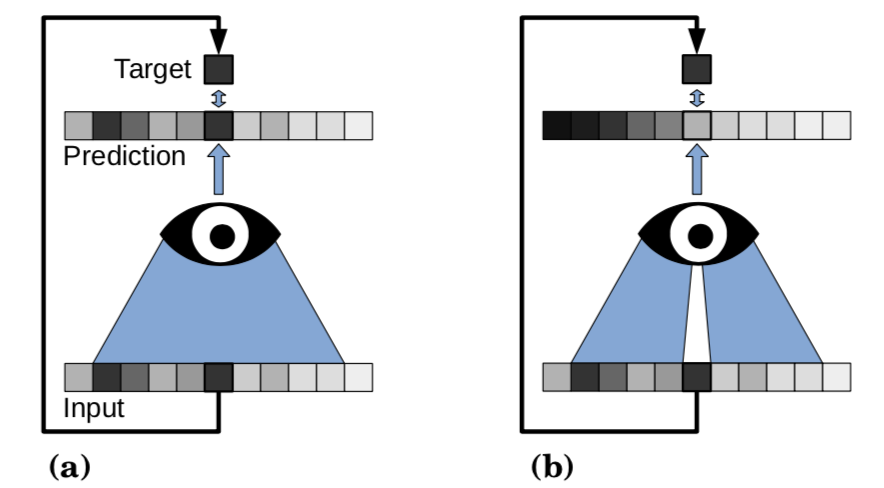
这是N2V论文中的图,在有监督学习中,给网络输入Input,获得Prediction,通过让Prediction接近GT,就能够让网络学会去噪。如果是无监督,那么这个Label是不存在的。如上图左侧(a),由于Prediction最终要接近Input,所以网络会学习恒等映射。但是我们的目标就是中single noisy image完成训练,既没有GT,也没有相同场景下的另一个噪声观测,实验要怎么做呢?
我们可以选择如上图(b)的做法,对比图(a)的感受野,我们将(b)中的感受野的中心部分挖掉一个像素,然后将剩余的部分作为Input,我们记为 I n p u t b l i n d Input_{blind} Inputblind?。由于网络看不到Input的中心像素点,我们称这个像素点为Blind Spot,也就是盲点。所有存在盲点的方法,我们都可以归类为Blind Spot Networks,也就是BSNs。我们将没有挖掉中心像素的Input记为 I n p u t t o t a l Input_{total} Inputtotal?,网络的输出Prediction和 I n p u t t o t a l Input_{total} Inputtotal?做loss,就可以促进网络学会去噪。
所以,N2V就讲完了(bushi…
简单说一下,我们只需要对Input做一件事——挖掉它的中心像素,然后扔给网络。网络的输出和Input之间的差距作为loss,就能让网络学会去噪。但是,这一切是有前提的,N2V有如下假设:
(我们依旧将像素视为信号+噪声)
- 不同像素位置,信号是相互有关联的;
- 不同像素位置,噪声是相互没有关联的(在一些文章中称为噪声独立假设);
- 噪声的均值为0。
网络可以看到除了中心像素以外的全部像素,包括它们的信号和噪声。网络实际学习的事情就是:如何根据周围的像素点,推测出中心像素点。由于不同像素位置的信号互有关联,比如你鼻孔边缘像素的附近可能是鼻屎,鼻子像素的附近可能有黑头,所以通过周围像素的信号,可能可以推测出中心像素的信号;但是依据噪声独立假设,无法通过周围像素的噪声推测出中心像素的噪声。所以将网络输出的中心像素
x
p
r
e
x_{pre}
xpre?和Input中被屏蔽的中心像素
x
i
n
x_{in}
xin?做loss:
x
p
r
e
?
x
i
n
=
s
p
r
e
+
n
p
r
e
?
(
s
i
n
+
n
i
n
)
=
s
p
r
e
?
s
i
n
+
(
n
p
r
e
?
n
i
n
)
x_{pre}-x_{in}=s_{pre}+n_{pre}-(s_{in}+n_{in})=s_{pre}-s_{in}+(n_{pre}-n_{in})
xpre??xin?=spre?+npre??(sin?+nin?)=spre??sin?+(npre??nin?)
s和n分别表示信号和噪声。为了表述方便,上式直接用了减法。根据在N2N部分的讲解,相信你已经猜到了网络的输出会是如下形式:
x
p
r
e
=
s
p
r
e
+
n
p
r
e
→
E
(
s
i
n
+
随机噪声
)
=
s
i
n
+
E
(
随机噪声
)
x_{pre}=s_{pre}+n_{pre}→E(s_{in}+随机噪声)=s_{in}+E(随机噪声)
xpre?=spre?+npre?→E(sin?+随机噪声)=sin?+E(随机噪声)
根据噪声零均值假设,我们有:
x
p
r
e
→
s
i
n
+
E
(
随机噪声
)
=
s
i
n
x_{pre}→s_{in}+E(随机噪声)=s_{in}
xpre?→sin?+E(随机噪声)=sin?
3.1. N2V实际是如何训练的?
上文所述,我们将Input中心像素点挖掉,并让网络的输出和完整的Input做loss。可是这样会导致每次只有一个像素影响训练过程。此部分我们简单讲下N2V原文是如何训练模型的。
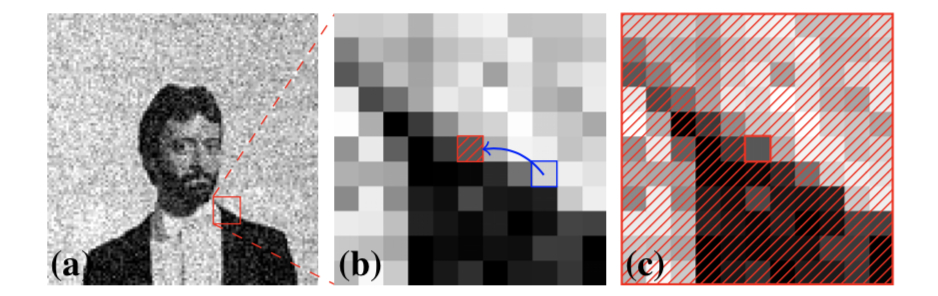
N2V实际的训练方式:随机选取 64 × 64 64 \times 64 64×64大小的patch,记为x。在x中随机选取N个点,对每个点p,都随机用一个点的像素替换它(具体地,在以p为中心、以网络感受野为大小的区域,如上图(b),用该区域内的一个随机像素(蓝色)替换中心像素(红色))。这样,x中就被创造了N个盲点,将这样的x记为 x b l i n d x_{blind} xblind?。将 x b l i n d x_{blind} xblind?输入到网络,获得输出记为y。我们将x中N个点和y中对应位置的N个点做loss。这样,输入一个 64 × 64 64 \times 64 64×64的patch做训练,一次就能够计算N个点对应的梯度。(注意采样N个点的过程中采用了stratified sampling以避免clustering,这个stratified sampling是分层采样,本文不进行讲解)
4. HQ-SSL——认为N2V效率不够高
本文是2019 NeurIPS的论文:High-Quality Self-Supervised Deep Image Denoising,作者认为N2V存在的问题是:N2V将输入的一部分pixel进行屏蔽,也只有这一部分pixel才能对loss进行贡献,作者认为这样会相对降低训练效率。本文本质上还是盲点网络派系BSNs的思想。
在4.1中,我们先阐述HQ-SSL的架构,以及作者认为他们比N2V更优的原因,并在4.2中阐述此架构的实际实现。在4.3中简单回顾本工作中盲点思想的体现。最后在4.4讲述一些公式,阐明本工作如何利用所设计的架构进行训练和去噪。
4.1. HQ-SSL的理论架构
主要是对卷积和下采样的改进,下面详细阐述。
4.1.1. 对卷积的改进
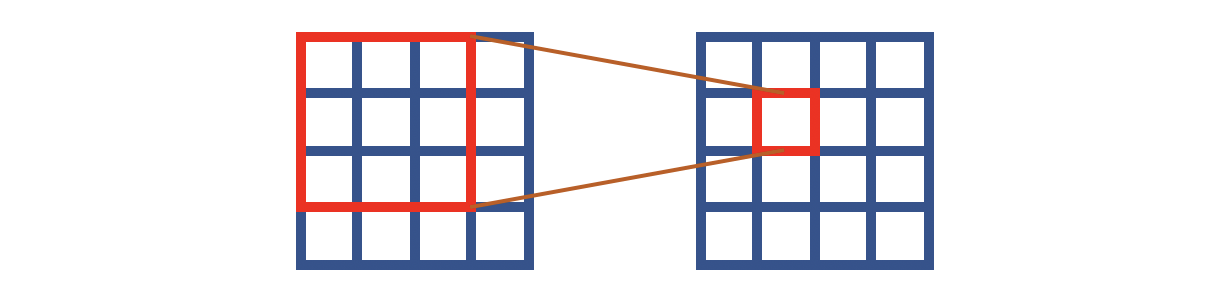
传统的卷积如上图所示,这里假设是 3 × 3 3 \times 3 3×3大小的卷积。注意输入和输出的对应关系:输出像素是输入对应感受野的中心位置。这就意味着网络推测一个像素,实际上用的是所有相邻位置+自身位置的像素。在N2V中,我们已经见识了盲点的思想,即像素的推测靠的是所有相邻位置的像素,但不包含自身位置的像素。如果将这种思想转换为卷积操作,姑且可以认为等价于下图的形式:
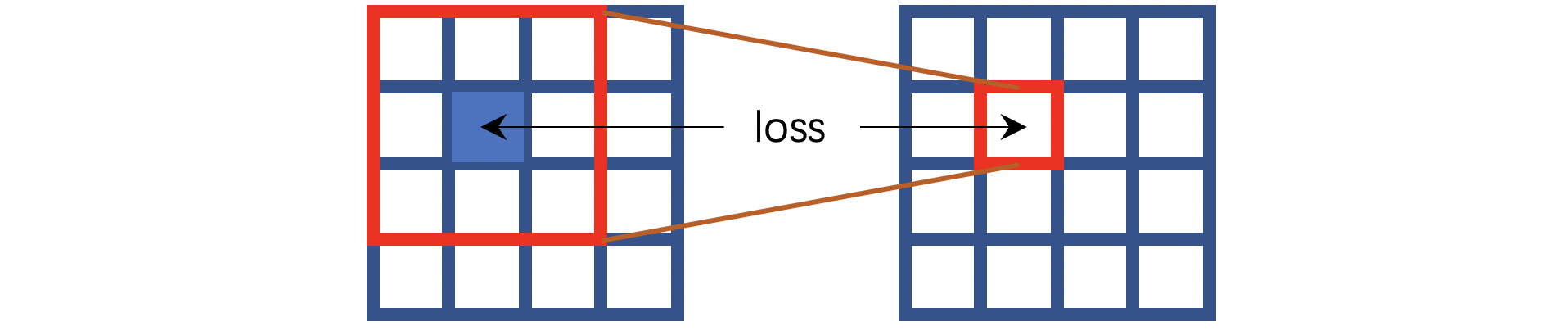
我用蓝色表示这个像素点是不可见的,也就是说卷积操作是无法看见中心像素点的。但是要求这样的计算能够推测中心位置的像素。这就是HQ-SSL的中心思想,不过这个工作并没有按照上图那样操作,它将卷积操作改造成了如下的方式:
HQ-SSL将卷积操作分为了四个方向,上图对应的是其中一种方向——输出像素取决于对应输入像素的上方相邻像素。如果算上所有四个方向,那么输出像素就取决于对应输入像素的上方、左方、下方、右方的若干相邻像素。
??注意作者的思路是:N2V工作中的盲点本质上是让模型根据周围的像素点推测中心像素点,那么我们可以改造卷积操作,让每一次卷积运算都只能看见中心位置像素的若干相邻像素。
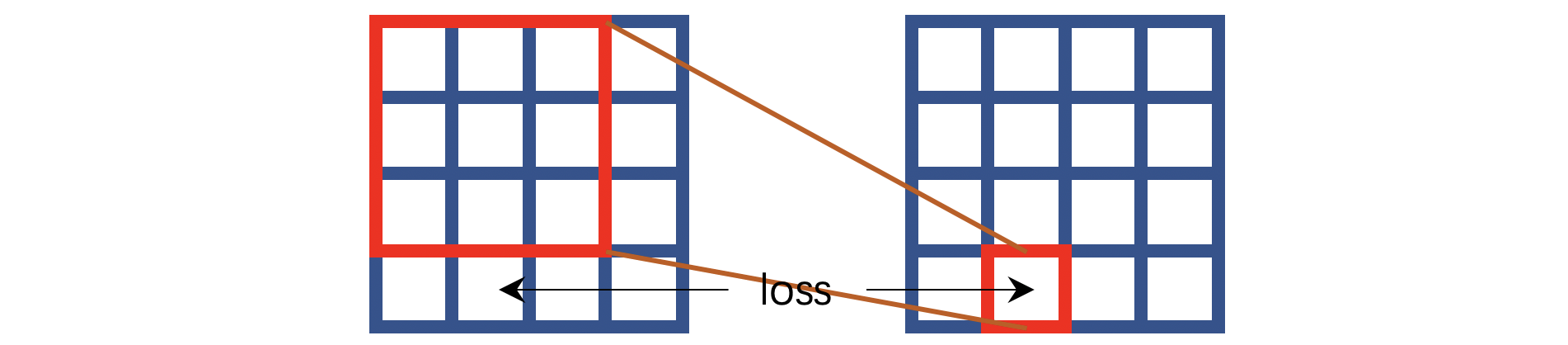
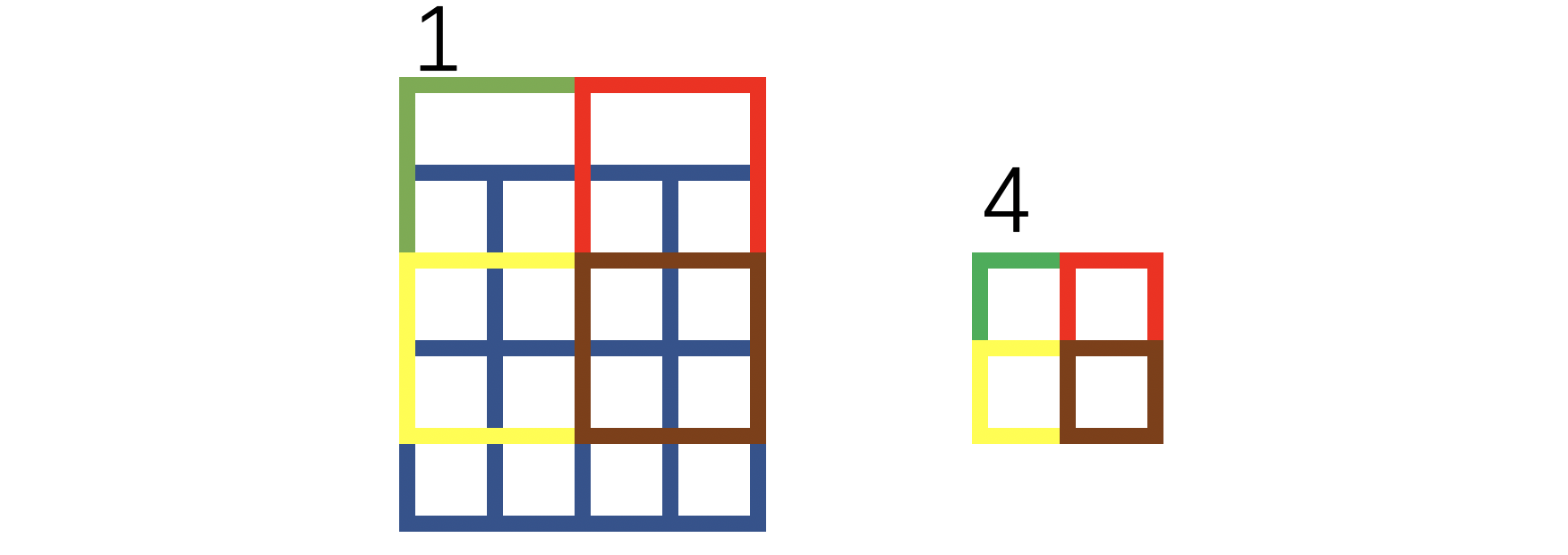
??在实现上,作者采用的是
平移
+
补
0
+
裁剪
平移+补0+裁剪
平移+补0+裁剪的操作,用下图简单阐述:
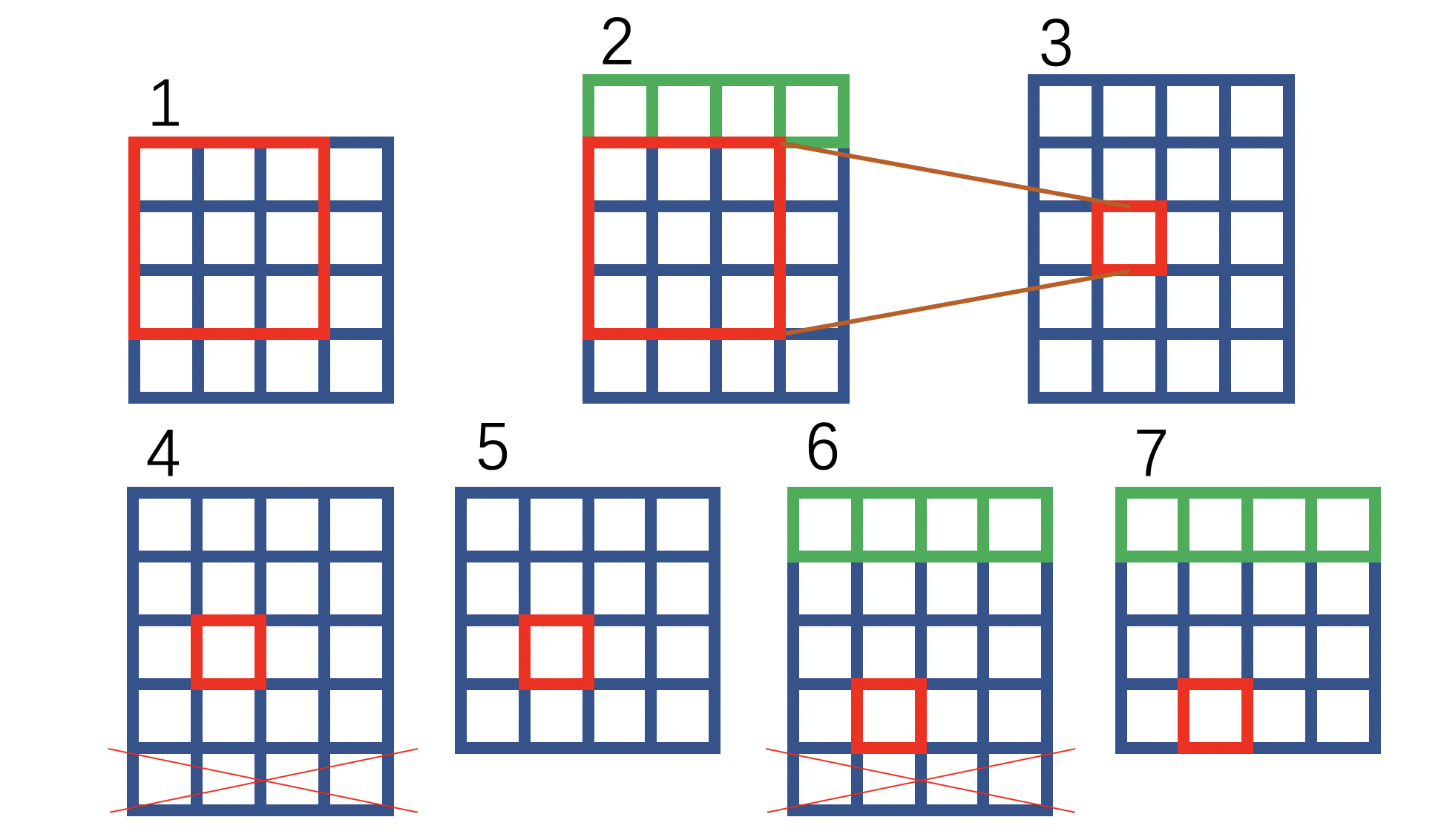
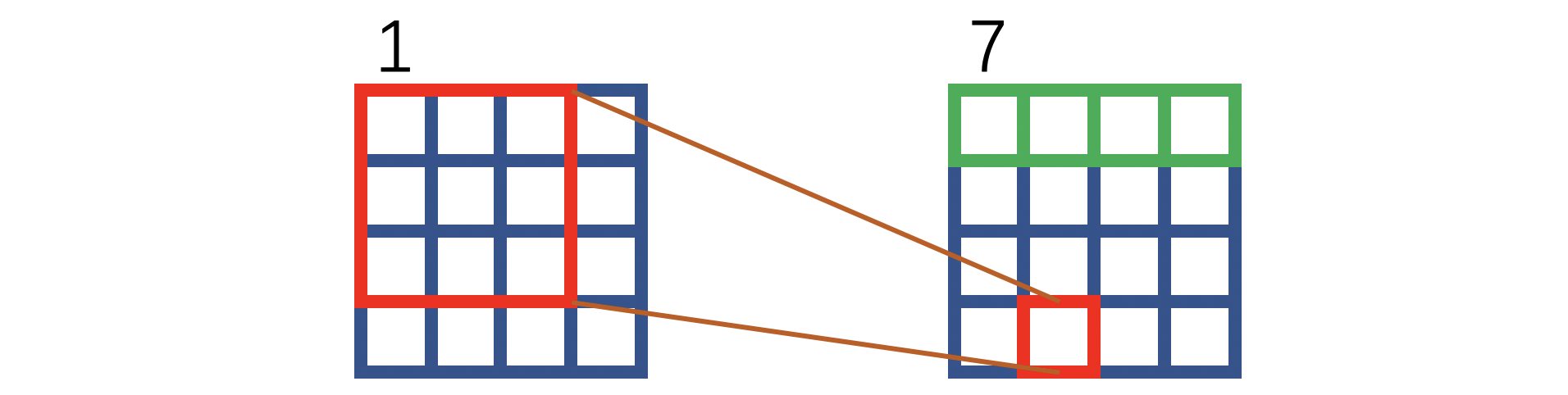
绿色表示补零操作,红色叉叉表示裁剪。可以看到,如上图操作之后,1和7的对应位置关系等价于上文所述HQ-SSL对卷积操作的改进方式:
注意:上述内容是根据作者提供的源代码获知,如果读者需要使用HQ-SSL,可以直接使用官方提供的代码。2023 CVPR有一篇工作引用了HQ-SSL,其官方代码和HQ-SSL的代码在卷积操作上是一致的。之所以写这段话,是因为HQ-SSL个人认为文章的关键段落较为晦涩,看不懂的读者朋友可以考虑直接看官方的代码,写的还是很易懂的。
??注意:上述内容的补零和裁剪可以视为平移,上图仅平移了1个像素,是因为卷积核大小是 3 × 3 3 \times 3 3×3。如果是更大的卷积核,那么可以考虑不同的平移像素数量。
4.1.2. 对下采样的改进
如果采用传统的
2
×
2
2 \times 2
2×2下采样,那么在上采样后,
2
×
2
2 \times 2
2×2区域内的四个像素,分别将和对应输入的同位置区域的四个像素相关联。作者针对下采样才用了和对卷积一样的改进方案——
平移
+
裁剪
平移+裁剪
平移+裁剪:
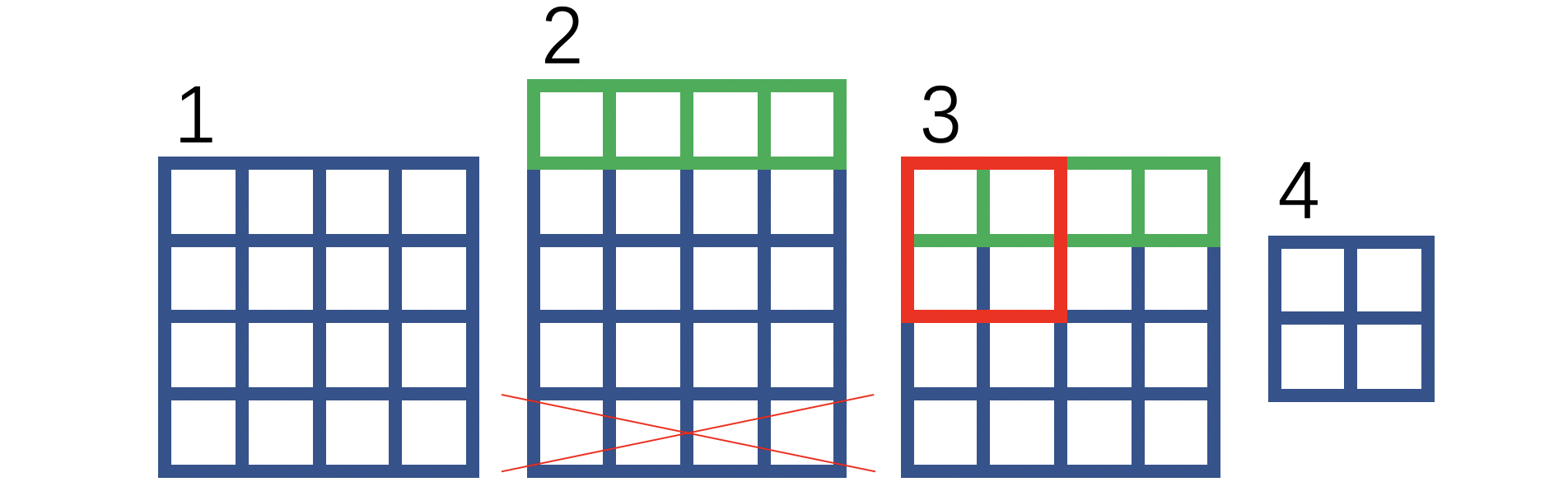
绿色方框表示补0,红色叉叉表示裁剪。我们将1和4放到下图,并用不同的颜色,这样可以直观理解:
通过上图你可以认为下采样也有一个感受野,每个像素的感受野对应于该像素的位置以及该像素位置的上方位置。
和卷积一样,下采样也会对应四个方向。下采样的方向和卷积的方向是一致的。
注意上采样没有被改造。
4.1.3. 比N2V好在哪?
这里我就直接摘录原文的内容了:
N2V是将输入的一部分pixel进行屏蔽,只有这部分pixel才能对loss做贡献,或者只有这部分pixel才是loss的组成部分。作者认为这样会降低训练效率,所以采用HQ-SSL的设计思想,通过对卷积和下采样进行改造,可以等价出盲点网络BSN的效果。而且,由于仅仅改变了卷积和下采样,所有pixel都是loss的组成部分,或者说所有pixel都能对loss做贡献、对训练做贡献。
4.2. HQ-SSL的实际实现
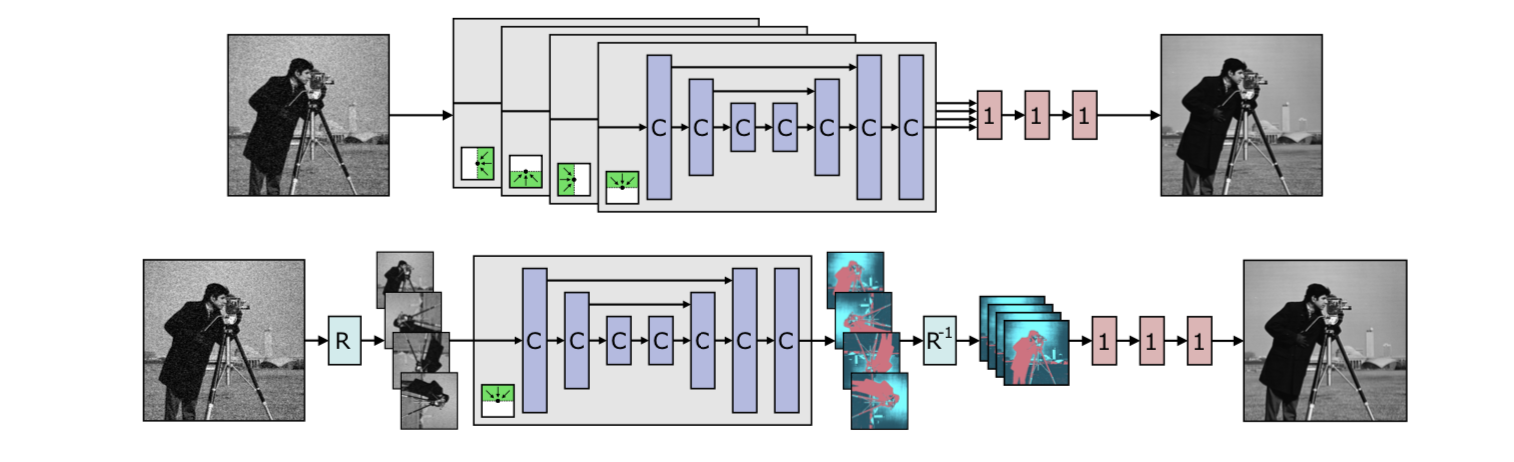
先看上图的上半部分,拥有4个branch。C表示4.1中所讲述的改造后的卷积,1表示
1
×
1
1 \times 1
1×1的卷积。绿色的部分表示四个方向的感受野,对应四个方向的卷积和下采样。再看上图的下半部分,表示作者实际的实现方式,虽然只有一个branch,但是通过旋转操作(图中的R)等价出了四个方向的卷积和下采样。由于只有一个branch,显然网络的参数量被大幅减少。
补:HQ-SSL的训练和测试须知
??如果没有此部分内容,我们会根据对N2V的印象认为HQ-SSL的训练方式是:将上图右端的预测结果和左边的输入做loss,并以此训练。在测试阶段则是直接将noisy image输入网络,就能够获得对应的去噪结果。
实际上不是,在论文的第三节(3 Self-supervised Bayesian denoising with blind-spot networks),作者对训练和测试过程进行了阐述。摘录网上博客对此部分的分析(我没有深究这地方):
网络输出噪声的一些分布参数,利用预测的参数可以进行去噪。
具体内容我不太感兴趣,所以不深究了。我阅读这篇论文主要目的是学习它的盲点思想。后续也有2023 CVPR的文章Spatially Adaptive Self-Supervised Learning for Real-World Image Denoising采用了HQ-SSL的盲点网络的设计(下一篇博客我将讲述它,届时我会将链接放在这里)。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!