【学习笔记】遥感影像分类相关精度指标
0.混淆矩阵
混淆矩阵是分类精度的评定指标。是一个用于表示分为某一类别的像元个数与地面检验为该类别数的比较阵列。
对检核分类精度的样区内所有的像元,统计其分类图中的类别与实际类别之间的混淆程度。
混淆矩阵中,对角线上元素为被正确分类的样本数目,非对角线上的元素为错分的样本数。
1. 精度名词解释
| 名词 | 解释 |
|---|---|
| 生产者(制图) 精度 | 地表真实为A类,分类图像的像元归为A的概率 |
| 用户精度 | 假定分类器将像元归到A类时,地表真实类别是A的概率 |
| 总体分类精度 | 等于被正确分类的像元总和除以总像元数,地表真实图像或地表真实感兴趣区限定了像元的真实分类。被正确分类的像元沿着混淆矩阵的对角线分布,它显示出被分类到正确地表真实分类中的像元数。像元总数等于所有地表真实分类中的像元总和。 |
| Kappa系数 | 所有地表真实分类中的像元总数(N) 乘以混淆矩阵对角线(Xkk) 的和,再减去某一类中地表真实像元总数与该类中被分类像元总数之积对所有类别求和的结果,再除以总像元数的平方差减去某一类中地表真实像元总数与该类中被分类像元总数之积对所有类别求和的结果所得到的。 |

用户精度:是指正确分到X类的像元总数(对角线值)与分类器将整个影像的像元分为X类的像元总数(混淆矩阵中X类行的总和)比率。用来表示分类结果中,各类别的可信度,整张分类成果的可靠性。
用户精度 = A / G
生产者精度:指分类器将整个影像的像元正确分为A类的像元数(对角线值)与A类真实参考总数(混淆矩阵中A类列的总和)的比率。用于比较分类方法的好坏。
生产者精度= A / D
总体分类精度:指被正确分类的类别像元数与总的类别个数的比值。
总体分类精度= A + I + J / N
2. Kappa系数
kappa系数是一种衡量分类精度的指标。它是通过把所有地表真实分类中的像元总数(N)乘以混淆矩阵对角线(Xii)的和,再减去某一类地表真实像元总数与该类中被分类像元总数之积对所有类别求和的结果,再除以总像元数的平方减去某一类地表真实像元总数与该类中被分类像元总数之积对所有类别求和的结果所得到的。
Kappa系数= [ N(A+I+J)-(DG+PM+QO) ] / [ N2 -(DG+PM+QO) ]*
Kappa系数是用于测定两幅图像之间的吻合度或精度的指标;
Kappa系数和总体精度的区别在于:总体精度只考虑了位于对角线上的像素数量,Kappa系数既考虑了对角线上被正确分类的像素,又考虑了不在对角线上的各种漏分和错分错误。
| Kappa系数 | 分类质量 |
|---|---|
| <0.00 | 很差 |
| 0.00~0.20 | 差 |
| 0.20~0.40 | 一般 |
| 0.40~0.60 | 好 |
| 0.60~0.80 | 很好 |
| 0.80~1.00 | 极好 |
3.举个栗子
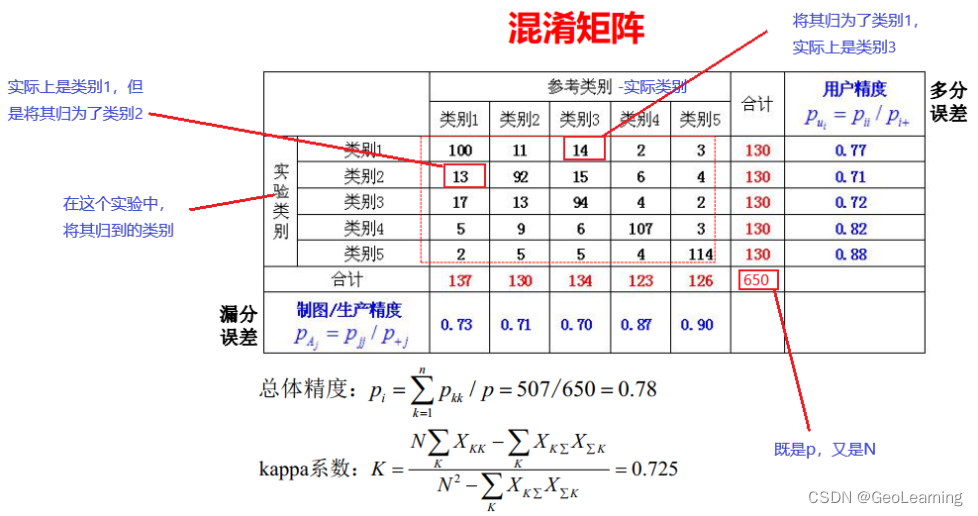
对这个例子的通俗描述(有可能不太准确)为:我们在实际地物上共取了 650 个像素点:有137个像素点属于类别1、有130个像素点属于类别2、有134个像素点属于类别3、有123个像素点属于类别4、有126个像素点属于类别5;但是呢,实验过程中分的太均匀了,给每一类都分到了130个像素点。
ok,分类完成了,怎样衡量这次分类实验的精度呢?前辈么就提出了四个量:生产者(制图) 精度、用户精度、总体分类精度、Kappa系数。看它们的字面意思不太好理解,那么我们可以这样记:生产精度可以衡量漏分误差,用户精度可以衡量多分误差(简称:生漏用多,越用越多)
参考资料
[1] 遥感图像分类领域的混淆矩阵
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
- Python教程
- 深入理解 MySQL 中的 HAVING 关键字和聚合函数
- Qt之QChar编码(1)
- MyBatis入门基础篇
- 用Python脚本实现FFmpeg批量转换
- Linux 定时器
- JavaWEB学习笔记 2024-1-10 --JavaScript
- AI for Science 塑造多学科研究新范式!欢迎参加 WAVE SUMMIT+2023深度学习开发者大会平行论坛
- python蓝桥杯的回形取数
- 20240115如何在线识别俄语字幕?
- MyBatis笔记
- Java基础面试题(四)
- Idea2023配置tomcat服务器(详细步骤版)
- leetcode——背包问题汇总
- 金属款压电雨量计的特点介绍